В почти каждом автомобиле есть датчик парковки задним ходом, чтобы следить за препятствиями на пути. Он известный в электронике под названием «ультразвуковой датчик». По сути, ультразвуковые датчики помогают обнаруживать высокочастотные импульсные сигналы или волны, неслышные человеку. Люди могут слышать в диапазоне от 20 Гц до 20 кГц, а ультразвуковые датчики могут засекать частоты гораздо больше, чем этот диапазон. Ну как, попробуем сделать схему датчика парковки автомобиля задним ходом?
Как работает ультразвуковой датчик
УЗ датчик оценивает расстояние до объекта, генерируя ультразвуковые волны. Затем он преобразует эти неслышимые волны в электрические сигналы. Следовательно, датчик содержит два элемента: передатчик и приемник. Передатчик излучает с помощью пьезоэлектрического кристалла. В то время как приемник принимает эту отраженную звуковую волну. Формула для измерения расстояния обычно выглядит как D=1/2 T*C.
Ультразвуковой датчик HC-SR04
Модуль HC-SR04 содержит передатчик и приемник. Рабочее напряжение около 5 вольт. Теоретически он может измерять расстояние от 2 до 450 см. Но практически выходит в пределах до метра. Кроме того, угол измерения составляет менее 15 градусов. Кроме того, рабочий ток датчика составляет менее 15 мА. Такой датчик может быть связан как с микроконтроллерами, такими как Arduino, так и с микропроцессорами, такими как PIC.

Датчик имеет 4 контакта. Контакты Vcc и заземления предназначены для подачи питания и заземления соответственно. Для инициализации и начала измерения триггерный контакт должен быть высоким в течение примерно 10 мкс, а затем выключен. Echo контакт является выходным контактом. Этот вывод становится высоким в течение периода времени, равного времени, необходимому для возврата волны.
Разъемы Arduino Nano Pin
Контакты питания: есть разъемы питания для 3,3 В или 5 В и два контакта заземления. Если хотите, чтобы Arduino подключался к внешней цепи, используйте нужный контакт питания. Кроме того, там также доступны два контакта заземления и сброса.
Контакты цифрового ввода/вывода: имеется 22 контакта цифровй шины, включая 6 контактов PWM и контакты TX, RX. Контакты со знаком тильды (~) показывают, что они могут использоваться для вывода прямоугольных импульсов ШИМ (для управления скоростью и т. д.).
Аналоговые входные контакты: доступно 8 аналоговых контактов.
Код прошивки для Ардуино
#define trigPin 8
#define echoPin 9
#define Buzzer 2void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(Buzzer, OUTPUT);}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance < 100)
{
digitalWrite(Buzzer,HIGH); //less than 100cm then buzzer will produce beep sound}
else {
digitalWrite(Buzzer,LOW);
}if (distance >= 300 || distance <= 0)
{
Serial.println(“Out of range”);
}
else {
Serial.print(distance);
Serial.println(” cm”);
}
delay(500);
}
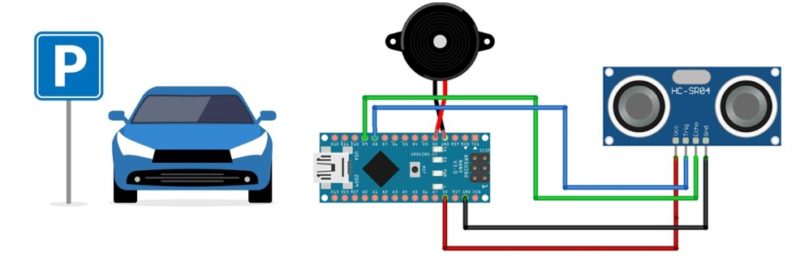
В этой схеме датчика парковки авто используем Arduino Nano. Таким образом, сопрягаем плату с ультразвуковым датчиком HC-SR04. Сам ультразвуковой датчик состоит из двух модулей, передатчика и приемника. Также имеется встроенная схема управления. Этот ультразвуковой датчик посылает серию сигналов частотой 40 кГц и определяет наличие обратного импульсного сигнала. Следовательно, если есть какой-либо обратный сигнал, датчик выдает высокий уровень. Теперь, чтобы собрать конструкцию, следуйте приведенной принципиальной схеме и подключите источник питания 5 В от наноплаты к VCC ультразвукового датчика. Далее подключите землю Arduino к земле датчика. Подключите триггерный контакт датчика к контакту D8 Arduino, а контакт Echo — к выводу D9 Arduino Nano. Согласно схеме подключите зуммер.
Пояснение работы кода
Во-первых, определить контакты датчика, которые подключены к цифровым контактам Arduino. Кроме того, определить контакт, к которому подключен зуммер.
В настройке void инициализировать последовательный монитор и определить режим контакта ввода-вывода.
В цикле void написать основной код. Определить расстояние по формуле. После этого применить условие if else, чтобы включить и выключить зуммер.
Применение такой схемы – разные автомобильные примочки, в том числе для других транспортных средств, автоматизация дома и роботизация производства, различные охранные устройства.





